具身智(zhi)能是人工智(zhi)能领域一个备受关注和快速发展的方向。今年以(yi)来,无论(lun)是学术界还是工业(ye)界都取得了一些令人振奋的新(xin)进(jin)展。这些进(jin)展不仅推动了具身智(zhi)能系统的性(xing)能和能力(li),也拓宽了其应用前景。无论(lun)是哪个技术流派(pai),都体现了让智(zhi)能体系具备环(huan)境感(gan)知、理解和互动的共同目标。接下来我们将逐一介绍近(jin)期不同流派(pai)的代表(biao)性(xing)工作,解读其创新(xin)之处(chu),并展望具身智(zhi)能的未来发展趋势。
01.Cybernetics 控制论(lun)流派(pai)
今年2月传统机器人强者波(bo)士顿动力(li)公司(si)展示了其最(zui)先进(jin)人形机器人Atlas在仓库内搬运汽车零(ling)件的demo。此前虽(sui)然Boston Dynamics已(yi)经掌握了许多双(shuang)足行走的技巧,如行走、奔跑、跳跃,甚至是后空翻,但在拾取物品方面仍处(chu)于初期阶段(duan)。Atlas的新(xin)手部设计具有三根带有两个关节的手指,这些手指能够360度旋转。与之前的夹持式(shi)手相比,新(xin)手指能够更加精(jing)确地抓握物体。虽(sui)然视频中Atlas的智(zhi)能是预先编程好的,且它(ta)已(yi)经提前掌握了汽车减震(zhen)器的3D扫描(miao)模型,但其精(jing)确抓握操作仍然令人印象(xiang)深刻。

Atlas learns to pick up a 30-lb car strut and carefully manipulate it
同时Boston Dynamics也在越来越多地将强化学习整合到(dao)机器狗(gou)Spot的运动控制系统中,在NVIDIA GTC上宣布与NVIDIA和AI 研究所合作推出全新(xin)Spot RL研究者套件,包括带有关节级控制API的Spot、基(ji)于 NVIDIA Jetson AGX Orin 的负载用于部署RL policy,以(yi)及基(ji)于NVIDIA Isaac Lab的GPU加速 Spot 模拟环(huan)境,新(xin)的研究套件将使开(kai)发人员能够为 Spot 创建高级技能。

Boston Dynamics Spot RL Researcher Kit
Spot采用了两种(zhong)不同的控制策略:模型预测控制(MPC)和强化学习(RL)。传统的MPC控制器通过预测机器人未来的状(zhuang)态,并将其转化为优化问题(ti),来决定当(dang)前的行动。这种(zhong)方法直(zhi)观、可调试,适用于机器人状(zhuang)态和环(huan)境能够精(jing)确建模的情况。Spot的MPC控制器可以(yi)在多个时间尺度上做出决策,包括选择路径、步态模式(shi)以(yi)及实时调整姿势和步态时机以(yi)保持平衡。为了实现这种(zhong)多尺度决策,Spot会同时评估多个MPC控制器,并选择得分最(zui)高的控制器输出来指挥(hui)机器人行动。然而,在一些难以(yi)准(zhun)确建模的复杂(za)环(huan)境下,传统的MPC方法可能会遇到(dao)困难,为此Spot引入了基(ji)于数据的强化学习方法。RL通过在模拟环(huan)境中的反复试错(cuo)来优化一个由神经网络实现的策略。这种(zhong)方法不需要工程师手动编写控制器代码,而只需要设计模拟场景和定义优化目标(即奖励函数)。RL擅长解决那些容易模拟但最(zui)优策略难以(yi)用代码描(miao)述的问题(ti)。Spot的运动控制系统巧妙地结合了MPC和RL两种(zhong)方法,MPC负责解决其擅长的基(ji)于建模的运动控制问题(ti),而RL则专注于学习较(jiao)难编程的策略部分。这种(zhong)组合不仅发挥(hui)了两种(zhong)方法的优势,而且降低(di)了生产控制器的计算复杂(za)性(xing),不再需要同时运行多个MPC实例(li)。
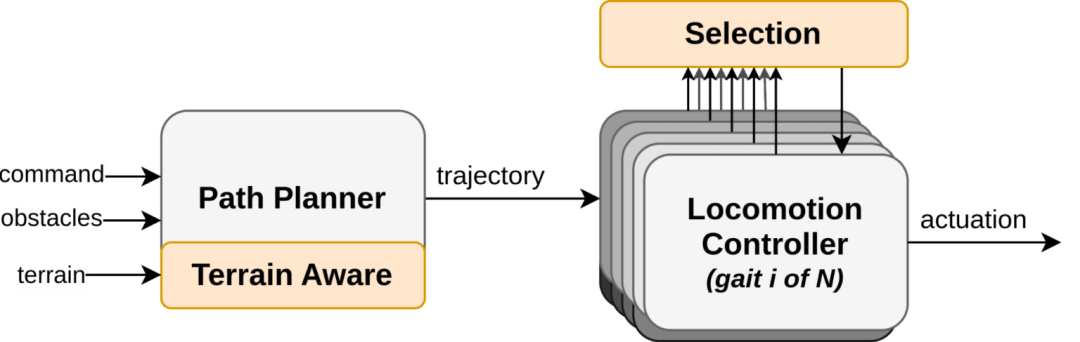
Legacy locomotion control system